

One of the advantages of EIGRP Feasible Successor is that it speeds up the EIGRP. In fact, if there is a Feasible Successor in the EIGRP network, such network converges faster than OSPF or IS-IS.
- But what is EIGRP Feasible Successor and how can we find one?
- If there is EIGRP Feasible Successor, how does EIGRP converges faster than OSPF or ISIS?
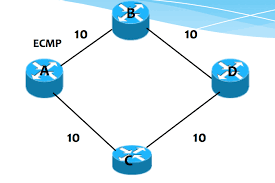
Figure-1 EIGRP Feasibility Condition
From the Router A’s point of view, Router B and Router C are the equal cost routers; as a result, both ABD and ACD path can be used in the network. What’s more, Router A installs both Router B and Router C not only in the EIGRP topology table but also in the routing table. There is no backup router in the above topology since Router A uses both Router B and Router C to reach the destination behind Router D. Let’s increase the link cost between Router C and Router D.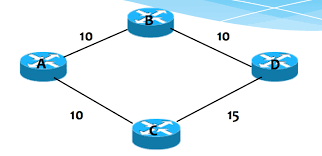
Figure – 2 EIGRP Feasible Successor
The link cost of Router C–D is 15. In order to satisfy the feasibility condition for Router A, the link cost of Router C–D should be smaller than that of Router A–B–D total cost. Since 15 < 10 + 10, Router C can be used as a backup – router by Router A – to reach Router D. Router C is installed in the EIGRP topology table of Router A. I will explain what will happen to the route if it is installed in the EIGRP topology table, instead of the routing table. Also, let’s examine one more example so that we can understand when Router C cannot be installed in the routing table or EIGRP topology table.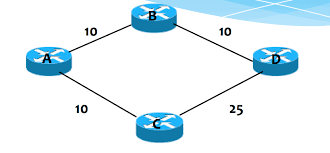
Figure-3 EIGRP feasibility condition is not satisfied
The link cost of Router C–D is 25. In order to satisfy the feasibility condition for Router A , the link cost of Router C –D should be smaller than that of Router A –B–D. Since 25 > 10(A–B) + 10(B–D), Router C cannot be used as a backup router – by the Router A – to reach Router D. In Figure-3, Router C is not a feasible successor (Backup Router) simply because it doesn’t satisfy the EIGRP feasibility condition.What if Router C–D link is 20? In that case, since 20 = 10(A–B) + 10(B–D), Router C cannot be used as an EIGRP Feasible Successor. The link cost of Router C–D has to be smaller than that of Router A–B–D to be Router C EIGRP FS of Router A. Now that we have learned how to find EIGRP Feasible Successor, I will explain why if there is EIGRP feasible successor, EIGRP converges faster than OSPF or ISIS.
When Router C satisfies the EIGRP feasibility condition, it is installed as a backup router in the EIGRP topology table of Router A. In order to understand this concept, I will first examine how EIGRP converges if there is a failure without feasible successor. Let’s assume that in Figure-3, Router A–B link fails. Router A, since there is no feasible successor (remember that Router C didn’t satisfy the EIGRP feasibility condition), will send an EIGRP query to Router C.
Router A with the EIGRP query will ask Router C whether it has an alternate route. Router C’s successor (Primary path) is Router D, which is the destination. That’s why Router C answers Router A’s query. But obviously, there is a delay in this process. Now, let’s examine what happens if Router C satisfies EIGRP feasibility condition.
In Figure 2, Router C is EIGRP FS of Router A. So, let’s use that topology. If Router A–B link fails in Figure -2, Router A doesn’t send an EIGRP query to Router C anymore. Rather, Router A immediately takes all the routes from EIGRP topology table and installs them on the routing table without running EIGRP Dual algorithm. Without running EIGRP, Dual algorithm’ statement is important. This is because if there is a failure, OSPF or IS-IS can run SPF algorithm again to find a backup route. Thus, in the case of failure, EIGRP FS reduces the convergence time by avoiding running EIGRP dual algorithm again.
Conclusion:
- EIGRP FS is a backup loop-free EIGRP router.
- EIGRP FS avoids sending EIGRP query.
- EIGRP FS reduces convergence time in the case of failure (Link or Node).
- EIGRP node doesn’t run the dual algorithm to find a backup path if there is a failure of if there is a feasible successor.
- That’s why arranging the link cost accurately is very important for capacity planning, fast convergence, and availability.